Indoor locator via wifi
Our team is developing a robot🤖 that, through the triangulation 📐 of the different WiFi networks of our school, is able to orient itself within the school buildings 🏫.
Project Chart 🚀
If you want to know the team go here!
Roadmap 🗺️
- Figure out the problems with the different script
- Unify all the single script in one program
- Test the final result
- Go rock!
What have we done ↗️
- We can now succesfully see the wifi positioning system working (also thanks to @Andrea-Tomatis)
- The Lidarr is working (we are struggling to manage the amount of data that we receive)
- Raspberry and Arduino work prefectly together (thanks to @samu4ne)
Actual Result 🔝
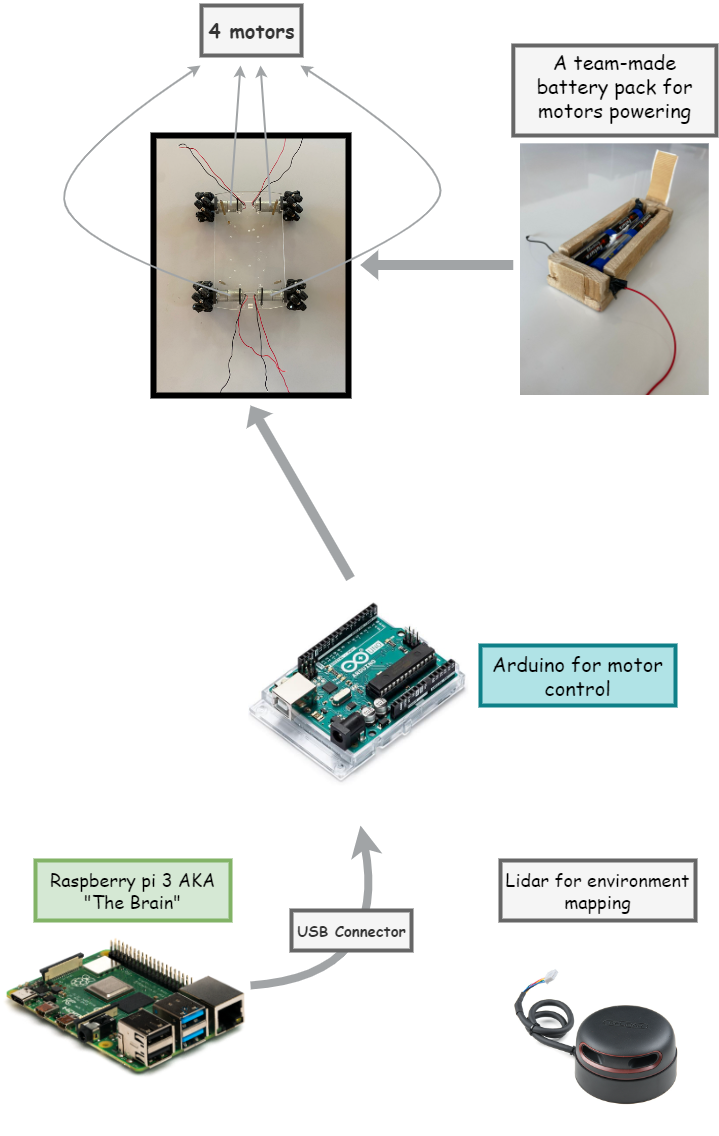
At the present time we have created a system to integrate the Lidarr into the movement system, the communication between Arduino and Raspberry Pi and the recognition of the area through a machine learing model.
Technologies Used 🖥️
The main technologies we will use are lidar for mapping the environment and managing the movements of the robot in small spaces and wifi for triangulating the position inside the internal rooms. On the software side we will use Python as a programming language and various libraries to be able to communicate with everything; then we will use C for programming an Arduino. On the hardware side, a Raspberry Pi will be used as the main brain and an Arduino Uno for managing the motors.
Respository structure 🗃️
- From here you can navigate through our Organization!
- About Us
- Documentation
- src
- Arduino code
Support or Contact 📱
![]()


